王中云同学结合国家自然科学基金和湖北省青年杰出人才基金项目的需求,提出了基于RFID的机器人运动控制与定位系统这一研究课题。王中云同学的硕士学位论文首先对RFID技术作了较详细的介绍,包括RFID的系统概况、应用和识别率问题等,在此基础上引出了本研究的重点:将RFID阅读器装备到机器人小车上,对机器人的运动控制进行实验研究。同时,在现有RFID定位技术的研究基础上,对基于RFID和RSSI的移动机器人定位算法进行了研究。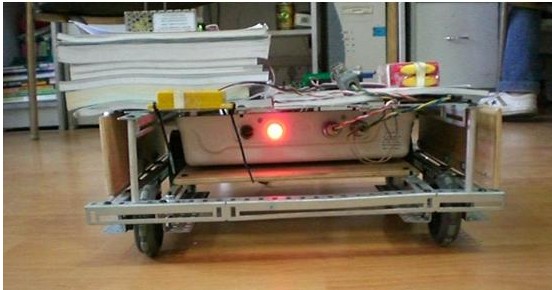
本课题的研究,取得了如下的成果:
(1)详细分析了射频识别技术在机器人上的应用,研究了基于射频识别技术的定位算法和定位估计理论;
(2)将RFID阅读器装备到机器人小车上。机器人通过串口通讯与阅读器连接,获取标签中的相关信息,从而能在铺有标签的地板上自动运行到达目的地;
(3)结合RSSI提出了一种机器人的定位算法。通过对标签的布置,实现对移动机器人在室内环境下的绝对定位。利用Matlab对定位算法进行仿真分析。